Novidades da versão Tecnomatix Plant Simulation 16
Confira todas as novidades da versão:
Programação Robótica e Comissionamento Virtual
O Tecnomatix 16 oferece aprimoramentos para simulação, criação de caminhos e programação offline (OLP), incluindo ferramentas de depuração aprimoradas e suporte pronto para criação e simulação de programas de robôs.
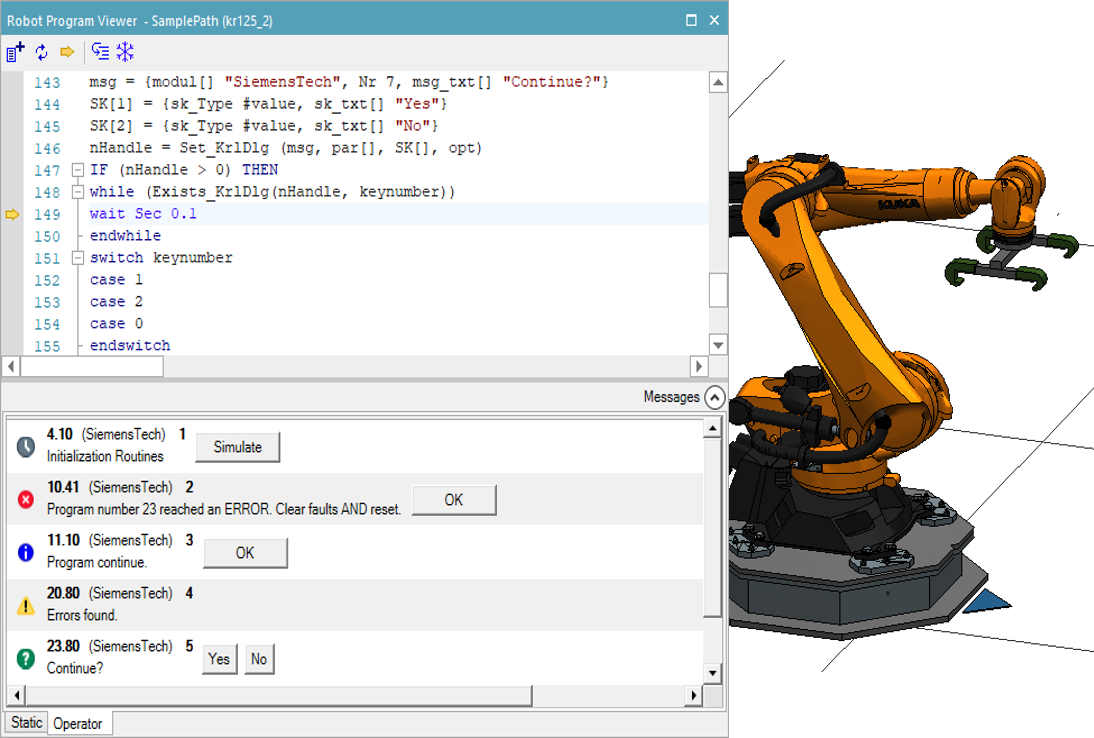
Mensagens do operador do robô para robôs Kuka
Agora você pode interagir com os Programas de Robôs Kuka usando o novo painel de mensagens do operador do Visualizador de Programas de Robôs. A atualização exibe mensagens do operador para robôs Kuka criados por comandos OLP, como MsgNotify, e permite que você interaja com o robô visualizando mensagens e selecionando ações usando botões configurados.
Tarefas paralelas do robô - Kuka submit interpreter
É possível simular um único interpretador de envio e comandos de variáveis globais para o Kuka Robots. Além disso o KRC aceita sintaxe adicional em comandos OLP, como a função "WAIT FOR", permitindo um comissionamento virtual mais fácil usando o controlador KRC pronto para uso, com menos necessidade de personalização.

Programação off-line aprimorada usando o ABB Rapid
Permite acesso a arquivos XML personalizados prontos para uso para o controlador ABB Rapid. Esses arquivos XML servem ao duplo propósito de fornecer uma experiência de usuário aprimorada para os programadores do ABB Rapid no Process Simulate e fornecer exemplos de como criar código XML de programa personalizado.

Veículos Guiados Automatizados (AGV) e Robôs Móveis Autônomos (AMR)
Suporte para simulação baseada em eventos de AGVs e AMRs no ambiente de fabricação, permite a validação e o comissionamento virtual de todos os aspectos de produção e logística para sistemas AGV.

Editor de Linguagem de Controle Estruturado (SCL)
O Editor de SCL é uma nova ferramenta para criar comportamento lógico para recursos (ou seja, Componentes Inteligentes). Permite adicionar e editar a lógica de um protótipo de recurso, mas com uma interface mais fácil de usar e uma linguagem de programação mundial comumente praticada.
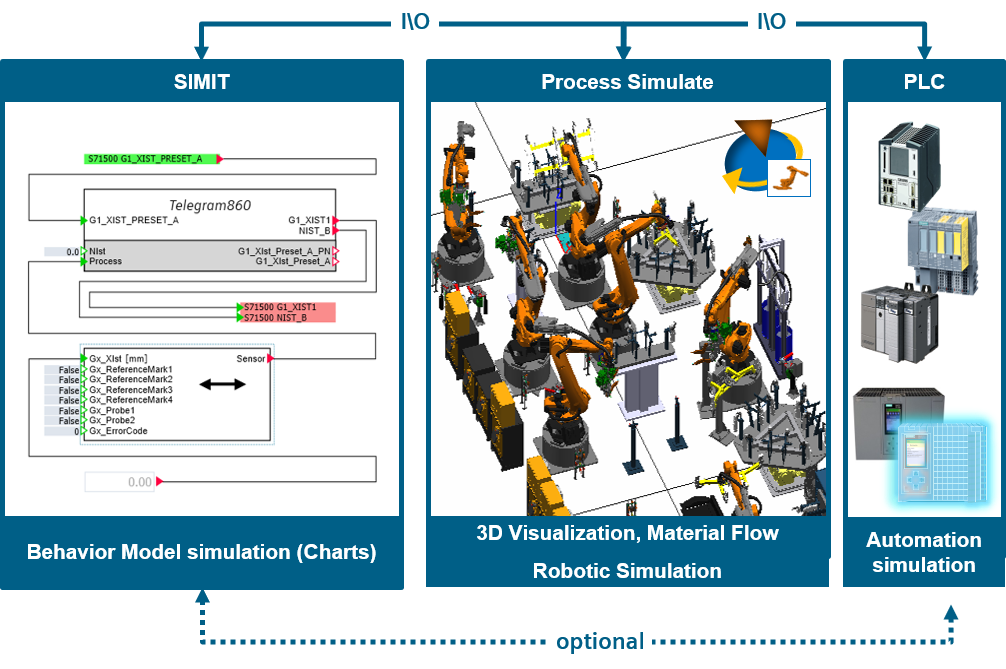
Conexão externa SIMIT
A nova conexão externa SIMIT permite que os usuários acoplem diretamente sua célula Process Simulate com seus programas robóticos, fluxo de materiais, layout e definições cinemáticas a um projeto SIMIT.
Simulação de Virtual Robot Controller (VRC)
Permite que os usuários se conectem ao RobotStudio da ABB ou ao ROBOGUIDE da Fanuc para simular sistemas robóticos completos usando as ferramentas do fornecedor do robô em conjunto com o ambiente completo do Process Simulate para comissionamento virtual altamente preciso com o mínimo de esforço de configuração retirado diretamente de qualquer robô real.

Figuras humanas da próxima geração
Totalmente texturizadas para um apelo visual excepcional, combinadas com a escala antropométrica de última geração que fornece fidelidade de forma em nível de bodyscan, essas figuras levam a modelagem humana ao próximo nível de realismo visual e dimensional.

Realidade Virtual (VR) - Mãos Vivas
Usando o hardware de luva de captura de movimento e figuras de mão de RV Process Simulate, você pode explorar a acessibilidade, a folga e a manipulação de objetos no ambiente imersivo Process Simulate VR. Você pode usar gestos e teclas de função para agarrar, pegar e liberar objetos, como ferramentas e peças, enquanto estiver imerso.
Conectividade do Teamcenter
A integração do Tecnomatix Process Simulate 16 ao Teamcenter aproveita as vantagens do backbone e fluxos de trabalho suaves. Para carregar e pesquisar dados, você pode usar o Teamcenter Manufacturing Access diretamente do Process Simulate.
Layout da planta – Melhore a carga e crie lógica
Agora é possível adicionar cinemática a equipamentos compostos e a objetos abaixo do equipamento composto, sem a necessidade de um conjunto de dados de cinemática predefinido.